MC_MoveContinuousRelative (FB)
FUNCTION_BLOCK MC_MoveContinuousRelative
This function block commands a controlled motion of a specified relative distance, ending with the specified velocity.

If the commanded position is reached and no new motion command is put into the buffer, the axis continues to run with the specified “EndVelocity”.
The function block will start the axis with state DiscreteMotion, while positioning.
It will change to state continuous motion (meaning: it will not stop by itself) with EndVelocity <> 0.
It will change to standstill with EndVelocity = 0.
This function block is specified here for systems without the support for the “BufferMode”.
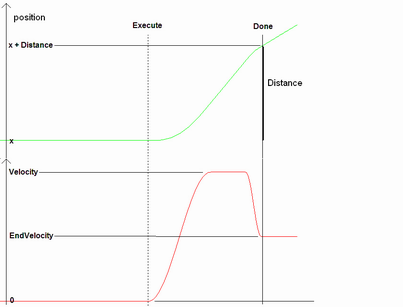
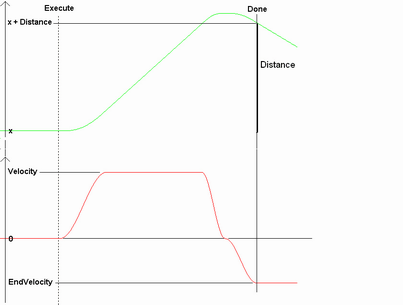
- Sampling traces showing the effect of the sign of the value of the input EndVelocity
- Input EndVelocity with positive direction
- Input EndVelocity with negative direction
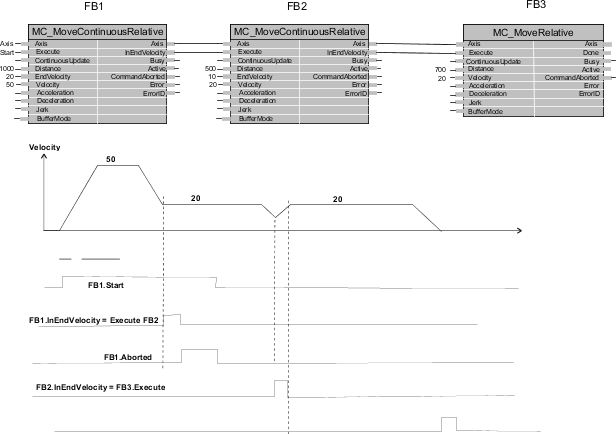
- Example for MC_MoveContinuousRelative
Note
Input validation is done at the rising edge of Execute. If function block is in Active/Busy state, new value at input will not be validated. If value passed is invalid function block will continue execution with last valid value.
- InOut:
Scope
Name
Type
Comment
Input
ExecuteBOOLStarts the function block at rising edge
ContinuousUpdateBOOLDecide if new input parameters are processed during the movement
DistanceLREAL[u] = Technical unit, Relative distance for the motion. Range: Maximum range is 16#7FFFFFFF in increments, if configured in units, range will be limited to equivalent of 16#7FFFFFFF increments
EndVelocityLREAL[u/s] Signed value for the end veloicty, determines the direction when ending the positioning movement
VelocityLREAL[u/s] Value of the maximum velocity (not necessarily reached). Range: >0
AccelerationLREAL[u/s°°2] Value of the acceleration (increasing energy of the motor). Range: >0,If value = 0, Acceleration will be equal to parameter paraMaxAccelerationAppl.If value > 0 and <= 1,Acceleration will be limited to 1.
DecelerationLREAL[u/s°°2] Value of the deceleration (decreasing energy of the motor). Range: >0,If value = 0, Deceleration will be equal to parameter paraMaxDecelerationAppl.If value > 0 and <= 1,Deceleration will be limited to 1.
JerkLREAL[u/s°°3] Value of the jerk. Range: >=0
BufferModeNot supported, default mcABORTING used
Output
InEndVelocityBOOLCommanded position finally reached
BusyBOOLThe function block is not finished
ActiveBOOLIndicates that the function block has control on the axis
CommandAbortedBOOLCommand is aborted by another command from other PLCopen function block
ErrorBOOLSignals that error has occurred within function block
ErrorIDError identification. For error details refer to Enumeration ERROR_ID
Inout
AxisReference to axis