





EtherCAT 从属驱动器对象下面嵌套的是轴对象,用户可在此根据应用要求配置每个轴。
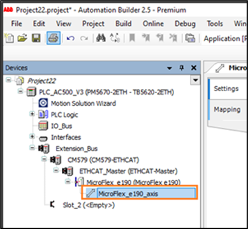
双击该对象可打开配置页面,页面上有两个独立的选项卡,一个是“设置” ,另一个是“映射” 。
用户可以根据应用需求更新这两个页面。
稍后在“生成应用程序” 过程中,向导将使用这些设置来定义该轴对象的操作和缩放。
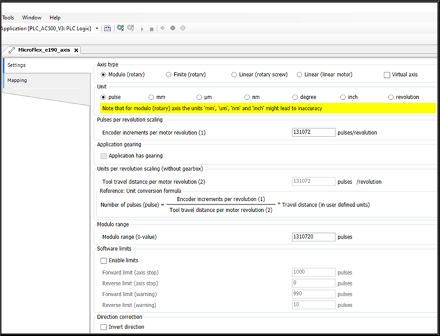
EtherCAT 轴对象设置
所有与应用程序和特定轴相关的设置都将在此完成,每个轴都需要仔细更新。根据此处提供的输入,向导将编译并生成代码。
“轴类型”
用户可根据应用要求选择要配置的轴类型。

以下是用户可以从“运动控制向导” 配置的设置列表及其含义:
|
轴类型 |
详细信息 |
最大上限(计数) |
|---|---|---|
|
模数(旋转) |
向导中的默认设置。 选择“Modulo” (旋转)后,您的轴将被配置为翻转轴,随后可以配置所需的模数范围。 |
16#7FFFFFFF[RB1] |
|
有限(旋转) |
您的轴将被配置为滚动轴,其中模数范围不可由用户编辑,并根据“单位” 选择、Inc_Per_R、U_Per_Rev_Nominator 和 U_Per_Rev_Denominator 设置进行计算。 |
16#40000000 |
|
线性 (旋转螺杆) |
当用户使用带有线性运动(线性轴)的旋转电机时,需要对此进行配置。 |
16#7FFFFFFF+/- |
|
线性 (直线电机) |
当用户轴为线性电机时,需要对此进行配置。 |
16#7FFFFFFF+/- |
|
轴模拟模式 |
该选项只能从此处读取,当用户配置了轴但还没有真正的硬件时需要使用该选项。可在“运动解决方案向导” 概述页面中进行选择。 虚拟轴配置 |
16#7FFFFFFF |
“Unit”
根据应用需求,用户可以在向导中选择所需的单元,向导将根据所选用户单元更新后续参数。
从下图中,用户可以找到当前支持的单位格式。

例如,当用户选择轴类型为“Modulo(旋转)” ,单位为度时,向导将根据所选用户单位更新后续参数,并填充默认值,例如:modulo range = 360 度(默认)。但要确保用户根据实际应用需求更新后续参数。
对于旋转轴,单位毫米、微米、纳米和英寸可能会因四舍五入误差而导致不准确。
“每转脉冲数刻度”
用户可根据电机每转的实际编码器增量更新“Pulses per revolution scaling” 。

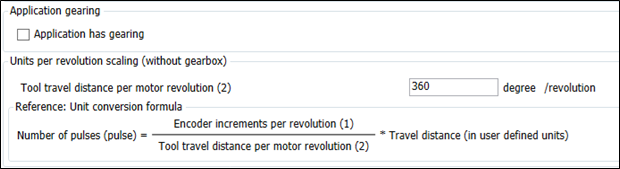
“应用齿轮/每转单位”
在这里,用户可以设置电机旋转一圈工作台行程,并定义与机械系统的传动关系。默认情况下,“Application has gearing” 复选框未被选中,这意味着应用程序没有齿轮传动,用户可以根据应用程序的要求更新“电机旋转一圈工作台行程” :
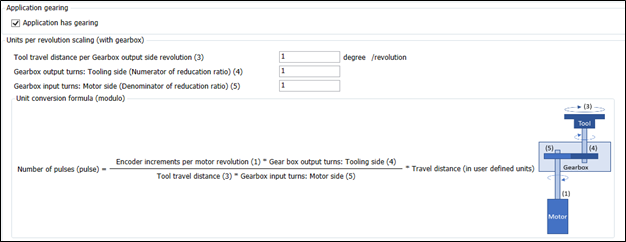
如果应用程序有齿轮,用户可以选中“Application has gearing” 框,系统会提示用户提供齿轮的详细信息。在生成应用程序时,向导会相应地更新这些信息。
“模数范围”
用户可在此提供“Modulo range” 。这是轴位置回零时的值。只有当用户选择轴类型为任意旋转轴时,该窗口才会激活。

“软件限制”
用户可以从向导本身配置一些常见的“软件限制” 。以下是软件限制列表,用户可通过向导在选定的应用单元中进行配置。
默认情况下,向导中的软件限制未启用,用户需要启用复选框“Enable limits” 来启用软件限制。

“方向和寻的类型”
“反转方向” - 应用程序需要改变轴的实际方向与 PLC 程序中的方向之间的关系时,需要设置此项。默认情况下,复选框未被选中,方向为正常。选择“反转方向” 复选框后,实际位置和参考位置都将反转,轴将朝相反方向移动。

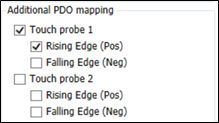
“使用 DRIVE IO 触发式测头归位” - 选择此项将允许轴使用EtherCAT 基于驱动器的触发式测头归位。
默认情况下,选择此选项也会为用户预选 PDO 映射,但以后可以根据应用需要进行更改。

“动态限制”
用户可在此更新最高限额。某些参数取决于驱动器的设置,需要正确设置才能获得所需的结果。
用户可将“最大喷涂速度” 设置为所需值,以限制最大喷涂速度。

伺服驱动器
例如,如果用户使用ABB 伺服驱动器,其编码器增量为每转 131072 个,最大速度为 6000 rpm。
最大应用速度 = 最大应用速度(每分钟) * 每圈工作台行程 / 60 * 齿轮箱代号 / 齿轮箱分母 = 6000 * 360 / 60 * 1 / 1
= 36000 度/秒
为方便计算参数,用户可使用范例程序文件夹 PS5611-Motion 中的 excel“AC500_V3_MotionControl_Startup guide for MC parameterization.xlsx” 。
示例项目中介绍了使用案例以及如何处理某个库的功能块。安装相应库后,可在默认路径中找到相应的示例项目⮫ AutomationBuilder 示例 。如果无法访问默认路径,请单击Automation Builder菜单中的“帮助 项目示例”。
“基于驱动器的限制”
在这里,用户可以定义决定驱动器预期行为的限制。

建议在驱动器和 PLC 参数中保持相同的“最大速度” 。
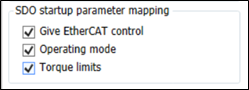
目前,用户可以在向导中定义应用扭矩限制,只有当用户在“映射” 页面中选择“扭矩限制” 时,这些限制才会被写入 SDO 启动参数。程序默认不使用这些参数。
“结果(计算)”
根据所提供的输入,向导将计算出结果,并可在配置页面末尾立即查看。
