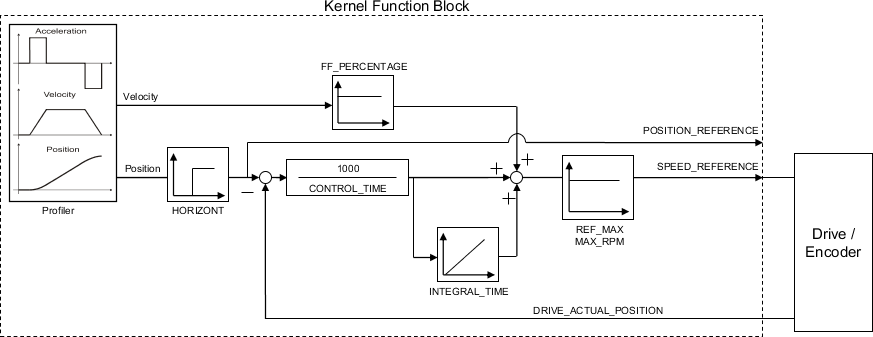
Control_Time
默认值为 100,比例增益为 10。
如果控制时间的值太短,位置控制回路就会不稳定。
如果不使用位置控制环,则不得将该参数设置为 0。
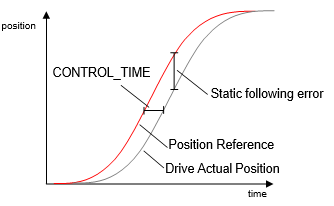
静态跟随误差取决于轴速度,很容易计算:控制时间乘以轴速度 ( p_error = v * CT )。
通常,应力求在较短的控制时间内达到较高的位置控制环增益,以实现较小的跟随误差。由于反应时间会影响整个系统的控制时间(驱动控制回路参数、PLC 周期时间以及通信现场总线),因此应加以考虑。
作为一项基本规则,控制时间应比速度参考输出与实际位置输入之间的反应时间至少长四倍。
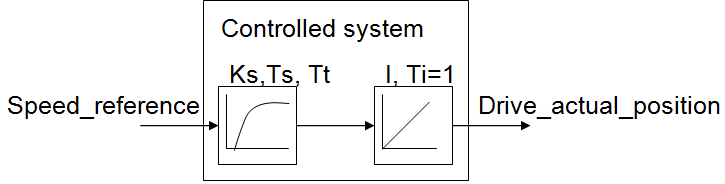
在测量时间 Ts 和 Tt 时,控制时间为 4 * (Ts + Tt) 将导致位置控制环路出现非周期性阻尼。从 PLC 内部测量数值非常重要(例如Trace)来包含完整的反应时间。Control_Time 的实际值可能在 50 - 500ms 之间。PLC 周期时间、总线周期时间和机械反应都会影响该值。
FF_Percentage
默认值为 0。
如果需要配置速度前馈,建议将值设为 80。如果数值大于 80,则需要使用参数 Horizon,否则所产生的位置将超调。
值为 100 时,速度参考输出将增加一个与当前位置参考值完全对应的速度。
Integral_Part
位置控制回路的整体部分可用于消除永久定位误差,例如在悬挂负载的情况下。
时间值可视为积分器将输入值相加以达到相同输出值所需的时间。
如果积分部分时间太短,位置控制环路就会不稳定。
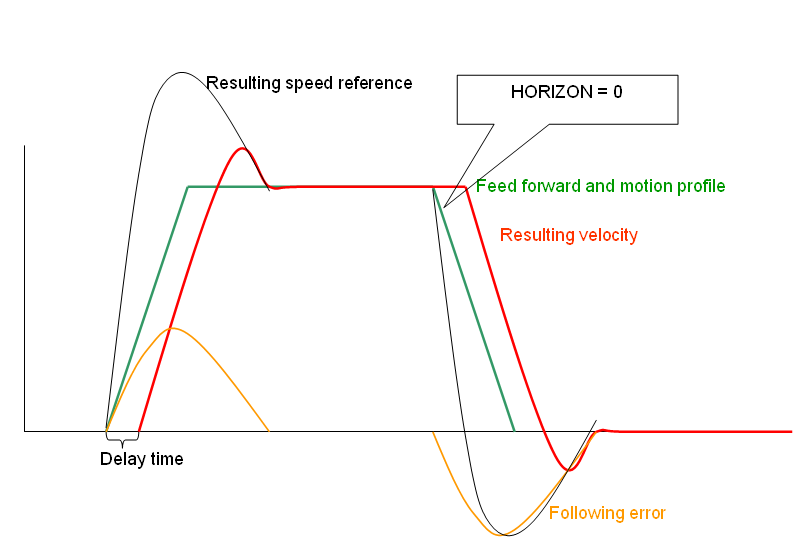
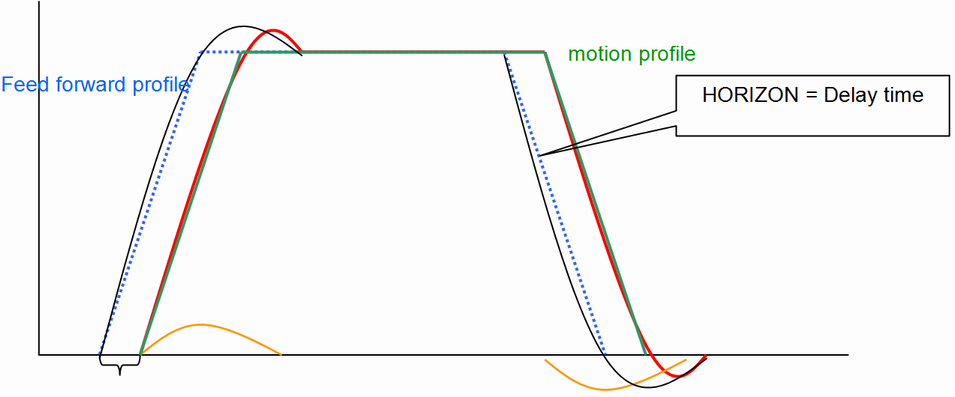
地平线
速度参考值与驱动系统之间的通信延迟会导致定位过程中因速度前馈增益而产生过冲。
该功能将通过速度前馈信号和位置参考信号之间的相对时移来补偿通信延迟,以防止出现过冲。
Horizon 的值可以近似假定为通信延迟的时间延迟。
延迟时间可能由控制环路的周期时间、发送速度参考的延迟、驱动器建立扭矩的延迟以及接收实际位置的延迟造成。为了克服这种延迟,可以使用 Horizon > 0。前馈参考将提前创建,而比例增益则应用于原始运动曲线。然后对延迟进行补偿。
如果前馈参数 FF_Percentage 为 0,则不应使用此函数。
默认值为 0 时,将停用该功能。
使用该功能时,将增加该轴所需的 PLC 计算时间。