如果用户要设置除 CSP(默认)之外的“控制类型” 和默认之外的映射(控制字、设置位置、状态字、实际位置),可选择“映射” 和“控制类型” 选项卡。它可以在这里的轴对象下找到:
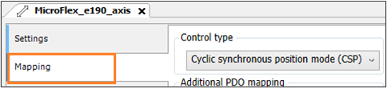
控制类型
默认情况下,向导被选中用于“循环同步位置模式 (CSP)” 。用户可根据应用需求进行更改。支持的控制模式有
循环同步定位模式(CSP)。
循环同步速度模式(CSV)。
用于负载控制的循环同步速度模式(CSVL)。
CSVL 是一种ABB 专用模式,用于实现负载控制/配置。通过使用该模式,用户可以使用“运动控制加载库” ,该库是基于“PLCopen Motion 第 6 部分 - 流体动力扩展” 实现的。有关负载/扭矩控制的更多详情,请参阅库集成文档、在线帮助文件中的系统技术以及示例程序文件夹中的示例程序/说明。
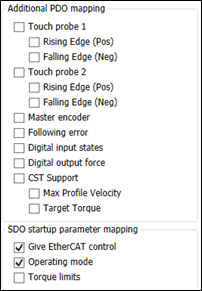
其他 PDO 映射
如果应用程序需要“额外的 PDO 映射” ,向导可帮助用户只需在此处选择即可添加最常用的 PDO 映射。
根据所选的控制类型,会自动生成一些必须的 PDO 映射,用户可以从向导中的附加映射区域找到最常用的 PDO 映射,并根据应用需求添加相同的映射。
用户可以通过从属设备常规配置页面的专家设置(如前所述)手动添加此处未列出的 其他 PDO 映射。
SDO 启动参数映射
默认情况下,选择了两个 SDO 启动参数,建议不要更改这些参数,除非用户具备 DS 402 控制模式的专家级知识或打算进行非标准启动编码,因为这将改变轴在启动时的预期运行。
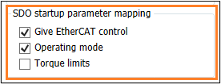
用户可以选择“扭矩限制” ,从“设置” 页面设置的扭矩值将被写入相应的从属驱动器启动参数列表。

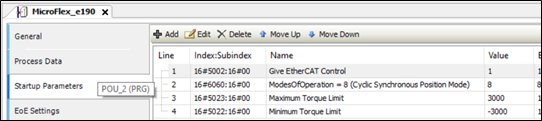
进行这些设置并执行生成的代码后,可以看到这些设置改变了驱动器EtherCAT 从属配置,如下图所示: