


The communication modules priority schema has been established for priority and high performance for communication module (CM) based communication via sync tasks. Lower priority for onboard Ethernet and I/O bus.
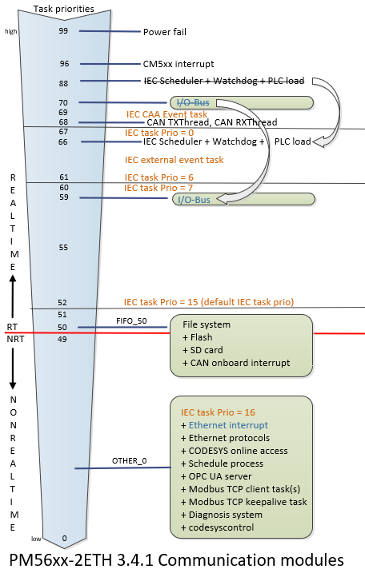
The highest IEC task priority 0 should be used for the sync task of the highest priority communication module, e. g. CM579-ETHCAT, priority 1 for the sync task with second highest priority, and so on.
Only the communication modules interrupts (CM5xx) and the CAA event task is processed with higher priority than the IEC tasks.
The IEC scheduler observer task has been moved to priority 66, means below IEC task priority 0 and on the same level as IEC task priority 1.
The priority of the I/O bus has been moved to priority 59, means inside the IEC task priority area, but below the external event task priorities.
Ethernet runs on non-real-time priority.
The priority schema communication module should be used in applications with one or more communication modules CM5xx with sync mode. As of Automation Builder 2.4.1 these are the CM579-ETHCAT EtherCAT master and CM598-CN CANopen master communication modules.
The sync task with priority 0 will be interrupted only by system interrupts. Since the IEC scheduler observer task is located below IEC priority 0, the watchdog for this task is also ineffective. However, this should not interfere with a sync task.
If more than one CM5xx are used in sync mode, the priority order must be defined. The sync task of highest priority CM5xx receives IEC priority 0, the next priority 1 and so on.
In a mixed PLC configuration with communication modules with and without sync mode the interrupts of the communication modules without sync mode will be handled on the priority of the lowest sync task. Currently supported communication modules without sync mode are CM579-PNIO PROFINET IO controller and SM560-S Safety PLC.