





对可用功能块的限制
-
作为缓冲模式,默认实现 MC_Aborting。这并不意味着当另一个运动开始时,轴会停止,而正在进行的运动仍处于活动状态。这意味着新的运动将立即获得控制权,并利用自身的加速度或减速度将速度变为自己的速度。
-
缓冲模式 MC_Buffered 可以使用轴状态 StandStill 作为下一个程序块执行的使能信号。
-
在功能块的扩展输入和输出中,以下功能无法实现:
-
缓冲模式:该实现只是支持 MC_Aborting 模式。
-
不支持以下读取状态输出:匀速、加速和减速。
-
归位功能块的扭矩限制。
-
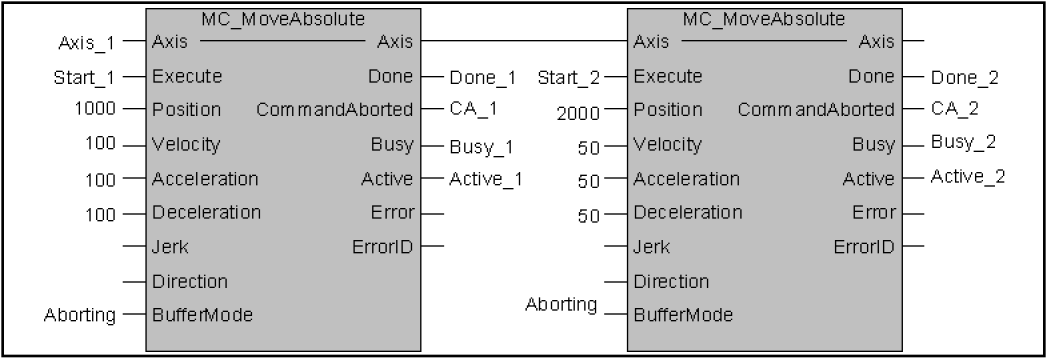
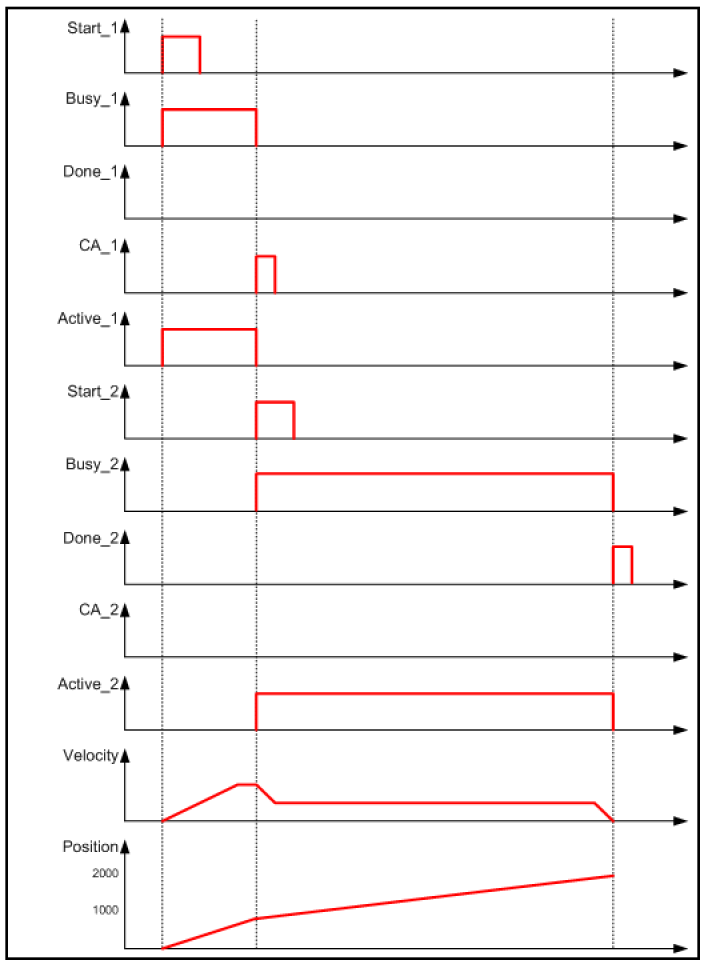
MC_Aborting Mode
图中显示的是 BufferMode MC_Aborting 的行为,这是唯一可用的 BufferMode。当第二个区块启动时,它将获得控制权,并以自己的速度继续前进。通过使用第二个功能块的加速度值来改变速度。中间不会停止运动。当第二个功能块被激活时,第一个功能块显示 CommandAborted。
MC_Buffered
通过使用第一个功能块的 "完成 "输出来启用第二个功能块的 "执行",可以实现缓冲模式 MC_Buffered 的行为。