为了实现运动控制的最佳效果,必须以最佳质量(抖动最小)向 PLC 传输实际位置。由于数据类型为 DINT,因此位置反馈应以增量形式进行。
内核功能块(CMC_Basic_Kernel 或 OBIO_PTOMotionKernel 或 OBIO_PWMMotionKernel)必须在每个周期调用一次,其任务需要固定的周期时间。
Axis_Ref 类型的变量用于连接PLCopen 功能块及其内核功能块。
轴配置必须使用功能块 CMC_Axis_Control_Parameter。⮫ “轴参数”
限位开关和绝对开关的信号应连接至数据类型为 CMC_Axis_IO 的元素。如果轴撞击传感器,绝对开关的信号必须为 TRUE。当轴离开限位开关所包围的区域时,相应限位开关的信号必须为真。如果需要,信号在连接到数据类型的元素之前必须反相。
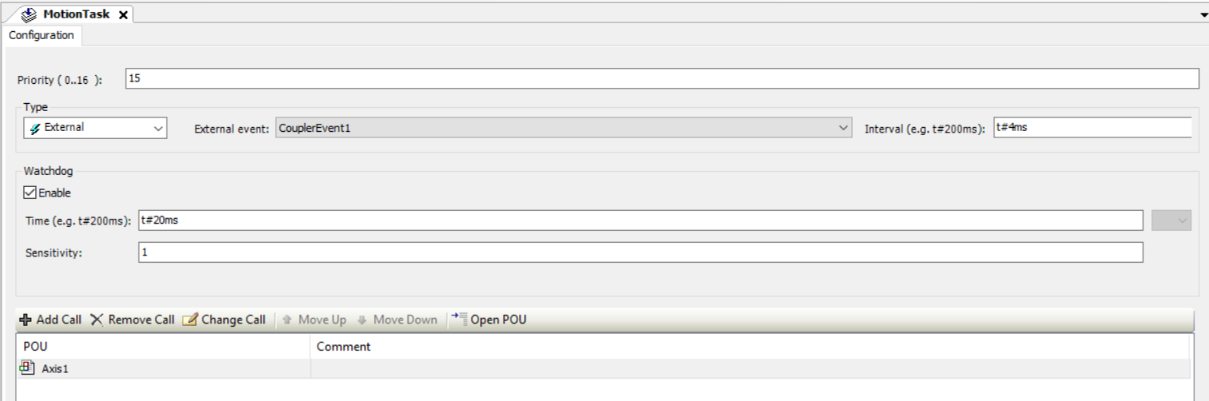
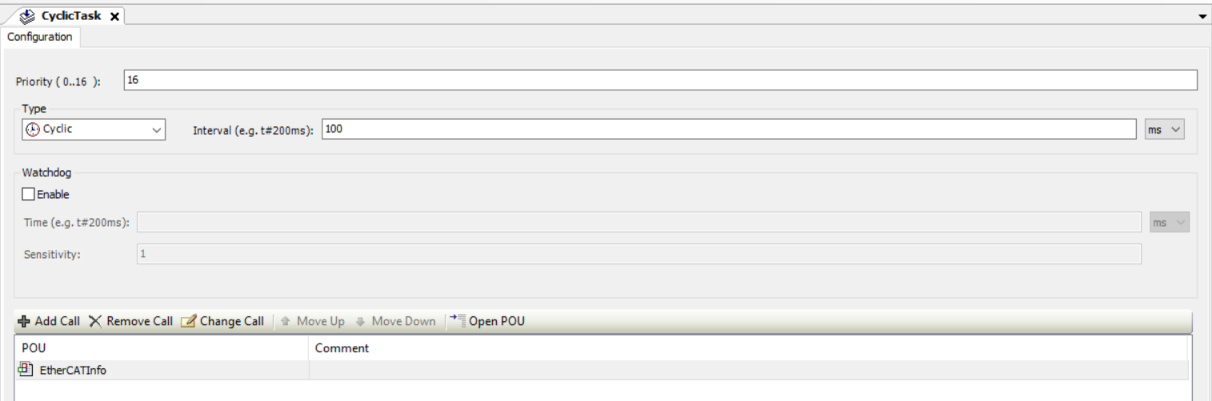
任务配置
内核功能块和轴 IO 数据传输应在循环任务中处理。这项任务应尽可能短且实时,以实现最佳运动控制性能。始终确保在优先级最高的任务中调用内核功能块,而其他应用程序必须在优先级较低的任务中调用。
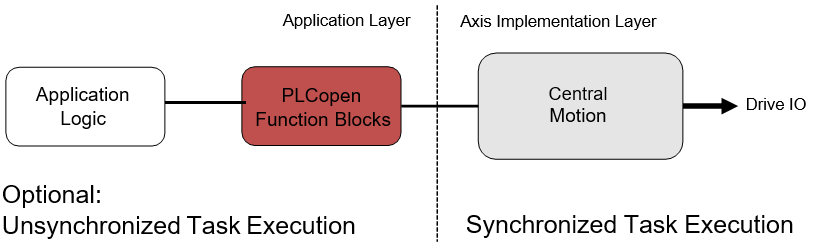
如下图所示,为了节省 PLC 的处理时间,PLCopen 功能块以及应用逻辑也可以在一个任务中处理,该任务的优先级低于轴执行的实时任务。
必须在与内核功能块相同的任务中调用的所有PLCopen 功能块:
-
MC_CombineAxes
-
MCA_MoveByExternalReference
如果将位置参考传送至驱动装置,则轴执行任务应与现场总线周期同步。下图是EtherCAT 的示例: