要使用多轴PLCopen 功能块,并将外部感应轴作为主轴,可以使用以下结构实现轴功能:
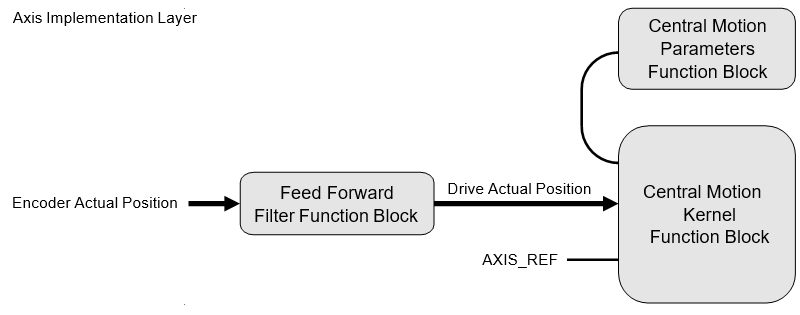
如果从动轴必须跟随外部轴的位置,则需要使用前馈滤波功能块。在这种情况下,感应外部轴的位置与沿感应位置移动从动轴之间会有时间延迟。然后,滤波功能块将根据外部轴的速度,在其位置上增加一定距离。
这里可以使用 ABB_MathFunctions_AC500.library 中的滤波功能块 MATH_LINEAR_REGRESSION。
对于跟随外部轴的轴,必须使用多轴PLCopen 功能块的输入 "MasterValueSource "的值 "mcActualValue"(来自 MC_Source 枚举)。
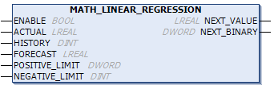
当使用滤波功能块 MATH_LINEAR_REGRESSION 处理实际位置时,可以实现两个不同的目的:
-
可补偿抖动或噪声
-
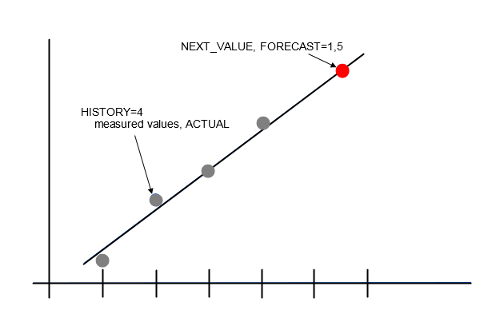
可以计算预测位置,以补偿位置测量的延迟
处理实际位置或任何其他主轴总是先于从轴。
否则,将额外延迟一个周期。
MATH_LINEAR_REGRESSION 功能块用于计算一个变量的进度,该变量在相等的时间段内捕获,并假定其遵循线性曲线。它使用高斯 "最小二乘 "算法来实现这一目的。计算直线的方式是使测量点到假定直线的距离平方和最小。
对数值的噪声或抖动影响进行补偿,并可计算出具有可调预测范围的变量预测值。
线性方程
平方和:

计算直线的梯度和偏移量时,要尽量减少 "总和"。然后用这两个值来计算预测值:

FORECAST=0 表示:现在的值,不考虑未来或过去。
如果实际值是一个模数值,例如单圈编码器或翻转轴,则必须在计算中考虑到这一点。可以使用 POSITIVE_LIMIT 和 NEGATIVE_LIMIT 这两个输入值进行配置。它们定义了实际值的上限和下限。此外,NEXT_BINARY 也会因此被限制在这些边界内。
示例