


The “Onboard Ethernet” priority schema has been established for priority for onboard Ethernet communication (e. g. via Modbus TCP).
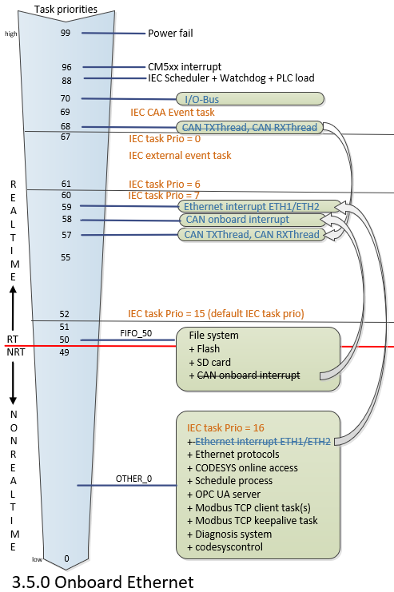
The Ethernet interrupt task has been moved from non-real-time area to priority 59, means inside the IEC task priority (real-time) area, but below the external event task priorities.
The CAN onboard interrupt is moved one priority below the Ethernet interrupt to priority 58 and the CAN transmit and receive threads one priority below the CAN onboard interrupt to priority 57.
This priority schema should be used for applications with much Ethernet communication, e. g. Modbus TCP communication with a high number of Modbus TCP clients/servers.
NOTICE
Since the Ethernet interrupt task is running in this mode in the real-time priority area, the Ethernet communication can block IEC tasks with priorities 12-15.
Working with real-time priority at Onboard Ethernet and using a high number of Modbus TCP client connections can force a high CPU Load. To avoid this, we recommend calling the Modbus FB’s in steps.
Example
100 Modbus TCP client connections shall be used in a 20 ms task.
Call 20 function blocks in a first cycle, 20 function blocks in a second cycle and so on.
