





Das Schema „Onboard EtherCAT“ ist für Benutzer gedacht, die das Master-Protokoll EtherCAT nutzen wollen, das an einem der verfügbaren Onboard-Ports Ethernet der entsprechenden SPS konfiguriert ist.
Aufgrund der besonderen Anforderungen von EtherCAT ist es erforderlich, die Konfiguration der Systemkomponenten im Zusammenhang mit Ethernet zu ändern und so einen Ethernet Anschluss mit niedriger Latenz bereitzustellen. Darüber hinaus werden die Prioritäten verschiedener Funktionen angepasst, um negative Nebeneffekte auf die IEC-Aufgabe EtherCAT zu reduzieren und die bestmögliche Leistung zu erzielen.
Merkmale und ihre Prioritäten
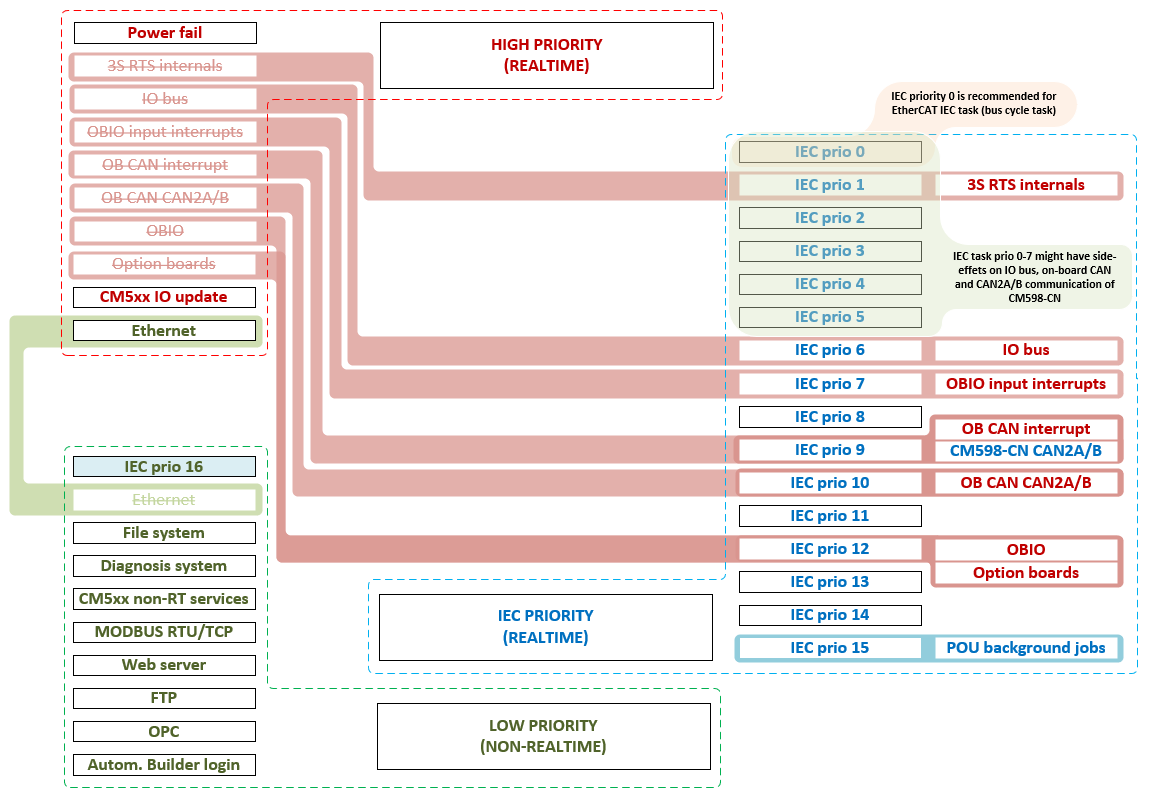
Das folgende Diagramm zeigt die Änderungen, die das Schema auf die verfügbaren Funktionen der SPS anwendet. Das Hauptziel dieses Schemas ist es, die Anzahl der Aufgaben, die die IEC-Aufgabe Ethernet unterbrechen oder verzögern können, zu reduzieren und gleichzeitig so viel Flexibilität wie möglich zu bieten. Anhand des Prioritätsbereichs der IEC-Aufgaben können die Benutzer entscheiden, ob vorhandene IEC-Aufgaben die entsprechenden Merkmale beeinflussen.
-
Verwenden Sie die IEC-Priorität 0 für die IEC-Aufgabe EtherCAT und eine Priorität kleiner als 0 für alle anderen Funktionen, um negative Nebeneffekte auf EtherCAT zu vermeiden.
-
Verwenden Sie die IEC-Prioritäten 1 bis 5 für Funktionen, die wichtiger sind als Merkmale mit hoher Priorität wie IO-Bus oder Onboard-I/O.
-
Um sicherzustellen, dass eine Funktion mit hoher Priorität nicht von einem IEC-Anwendercode (außer EtherCAT) beeinflusst wird, verwenden Sie eine IEC-Task-Priorität, die niedriger ist als die Priorität der entsprechenden Funktion.
Es ist nicht verboten, IEC-Task-Prioritäten zu verwenden, die anderen SPS-Funktionen zugewiesen sind.
HINWEIS
Seien Sie vorsichtig, wenn Sie dieses Schema verwenden, um unerwünschte Nebeneffekte auf andere Merkmale als EtherCAT zu vermeiden, die durch die Verletzung einzelner Timing-Beschränkungen oder Anforderungen verursacht werden!
Der E/A-Bus muss in der Lage sein, alle angeschlossenen S500-E/A-Geräte innerhalb von 20 ms zu aktualisieren. Andernfalls wird eine Ausnahme ausgelöst,
die zum Anhalten der Anwendung führt. Verwenden Sie den PLC-Shell-Befehl io-bus desc, um Informationen über das Bustiming auszugeben. Der Ausgang enthält Informationen
über die IO-Bus-Zykluszeit:
--- E/A-Bus-Informationen -
Baudrate [Baud]: 1714286
Min. Zykluszeit [us]: 1037
Maximale Zykluszeit [us]: 10936
Letzte Zykluszeit [us]: 1567
Die maximale Zykluszeit muss deutlich unter 20 ms liegen, um sicherzustellen, dass das System stabil läuft und keinen Timeout-Ausnahmefehler auslöst.
Wenn die Zykluszeit den Grenzwert erreicht, versuchen Sie, die Menge des von IEC-Anwendertasks mit höherer Priorität als der E/A-Bus ausgeführten Codes zu reduzieren oder die Task-Prioritäten anzupassen, falls möglich.
Port mit niedriger Latenzzeit
Neben der Anpassung der Task-Prioritäten ändert das Schema „Onboard EtherCAT“ auch die Konfiguration des Low-Level-Treibers Ethernet, um dem Benutzer einen dedizierten Port mit niedriger Latenzzeit anzubieten.
|
SPS-Typ |
ETH1 |
ETH2 |
|---|---|---|
|
PM50xx |
Geringe Latenzzeit |
Wartung und Visualisierung |
|
PM56xx |
Wartung und Visualisierung |
Geringe Latenzzeit |
Der andere Port bleibt auf niedriger Priorität, um die Auswirkungen auf die Aktivität des v-Protokolls zu minimieren. Es ist für die Anmeldung (Automation Builder), Visualisierungsdienste oder ähnliche (Nicht-Echtzeit-) Aktivitäten gedacht.
Bei der Konfiguration der eCo CPU „Onboard EtherCAT“ Parameter wird die ETH1-Schnittstelle auf die IP-Adresse 0.0.0.0 eingestellt. Nach dem Wechsel zu einem anderen Kommunikationsschema als „Onboard EtherCAT“,bleibt die IP-Konfiguration des für Onboard Ethernetverwendeten Ports EtherCAT ungültig (IP-Adresse 0.0.0.0). Sie muss vom Benutzer erneut beantragt werden, wenn der Anschluss von der neuen Anwendung benötigt wird.
Die Funktionalität „Onboard EtherCAT“ ist nur für die eCo-CPU ab SystemFW 3.7.0 nutzbar/sichtbar.