Alle Funktionsblöcke in den Automation Builder „Motion Libraries“ haben die folgenden Einschränkungen:
-
MC_Aborting (Standard) - Dies bedeutet NICHT, dass die Achse anhält, wenn eine andere Bewegung gestartet wird, während eine laufende Bewegung noch aktiv ist. Es bedeutet stattdessen, dass die neue Bewegung sofort die Kontrolle übernimmt und die Geschwindigkeit auf ihre eigene Geschwindigkeit ändert, indem sie ihre eigene Beschleunigung oder Abbremsung verwendet.
-
MC_Buffered konnte erreicht werden, indem der Achsenzustand StandStill als Freigabesignal für das Execute des nächsten Satzes verwendet wurde.
-
-
BufferedMode: Die Realisierung unterstützt nur den MC_Aborting-Modus.
-
Beispiel
MC_Abbruchmodus
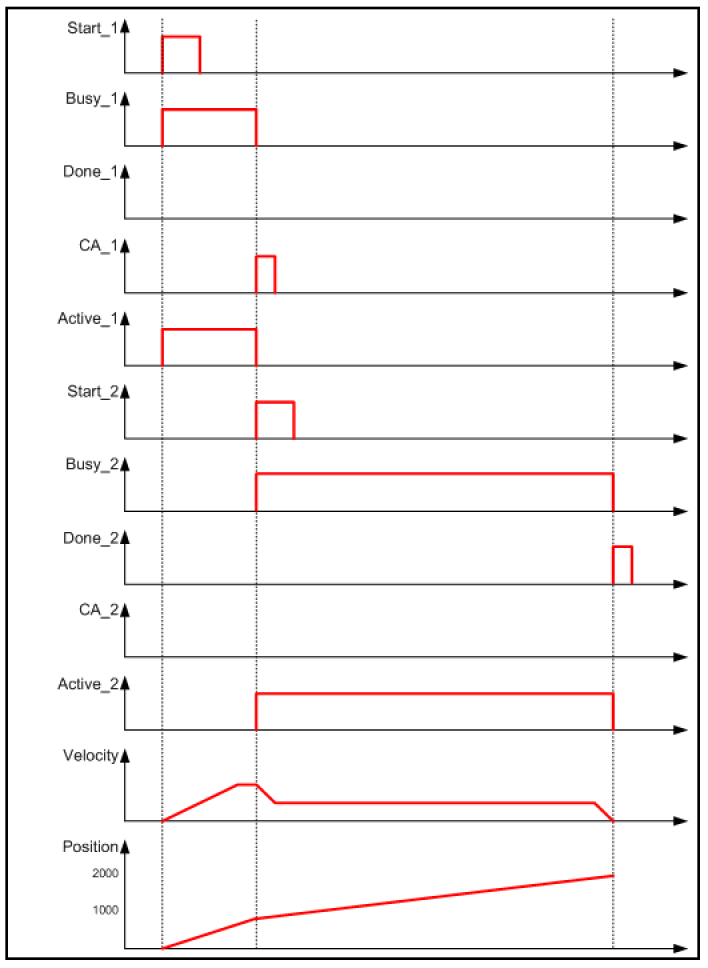
Das Diagramm zeigt das Verhalten mit „BufferMode MC_Aborting“, dem einzigen verfügbaren „BufferMode“. Wenn der zweite Block aktiviert wird, übernimmt er die Kontrolle und fährt mit seiner eigenen Geschwindigkeit weiter. Die Geschwindigkeit wird mit Hilfe des Beschleunigungswertes aus dem zweiten Funktionsblock geändert. Die Bewegung wird zwischendurch nicht gestoppt. Der erste Funktionsblock zeigt „CommandAborted“ an, wenn der zweite Funktionsblock aktiviert wird.
MC_gepuffert
Ein Verhalten gemäß „BufferMode MC_Buffered“ kann erreicht werden, indem der Ausgang „Done“ des ersten Funktionsblocks verwendet wird, um die Ausführung des zweiten Funktionsblocks zu ermöglichen.
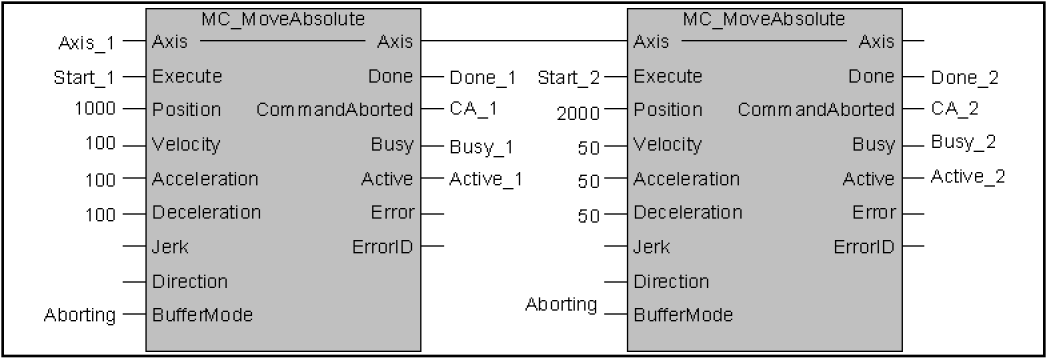
Programmbeispiel
Zeitdiagramm