All function blocks in the Automation Builder “Motion Libraries” have the following restrictions:
-
MC_Aborting (default) - This does NOT mean that the axis stops when another movement is started while an ongoing movement is still active. It means instead that the new movement will take control immediately and change the velocity to its own velocity by using its own acceleration or deceleration.
-
MC_Buffered could be reached with using the axis state StandStill as enable signal for the Execute of the next block.
-
-
BufferedMode: The realization just supports the MC_Aborting mode.
-
Example
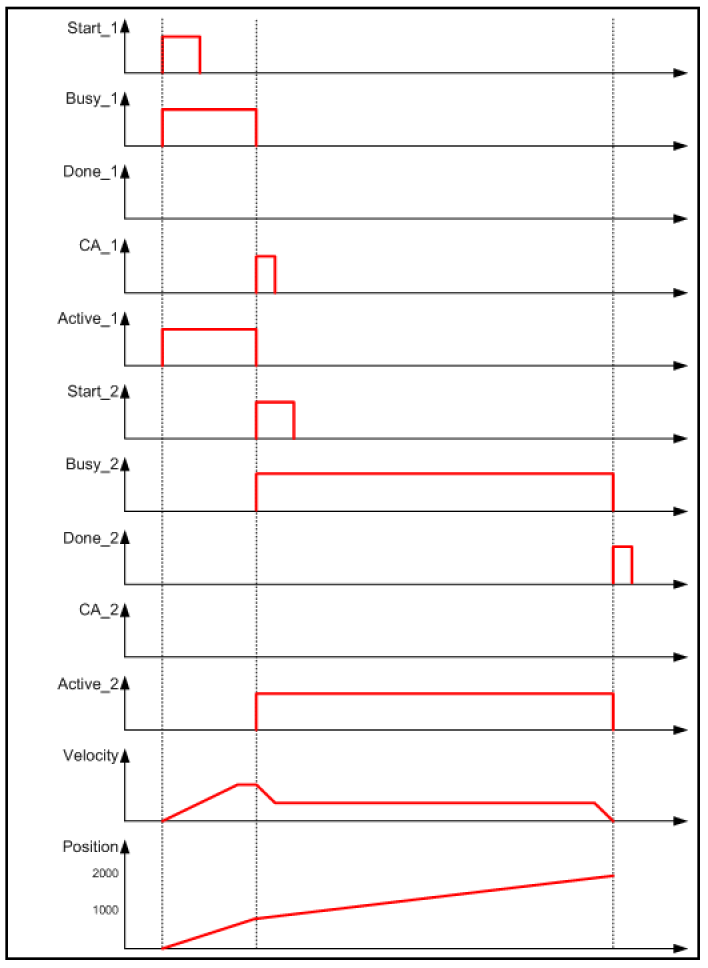
MC_Aborting Mode
The diagram shows the behavior with “BufferMode MC_Aborting”, which is the only available “BufferMode”. When the second block is activated, it will take control and will continue on its own velocity. The velocity is changed by using the acceleration value from the second function block. The movement will not be stopped in between. The first function block shows “CommandAborted” when the second function block is activated.
MC_Buffered
A behavior according to “BufferMode MC_Buffered” could be reached by using the “Done” output from the first function block to enable the execute of the second function block.
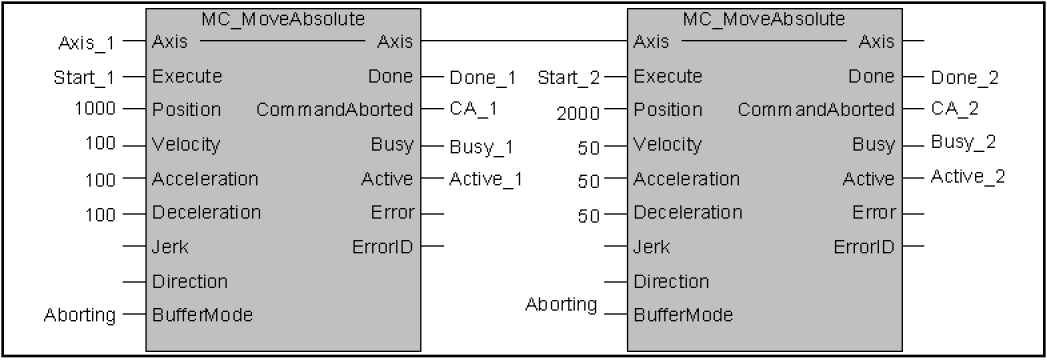
Program example
Timing diagram