





压力控制模式遵循此操作顺序:
-
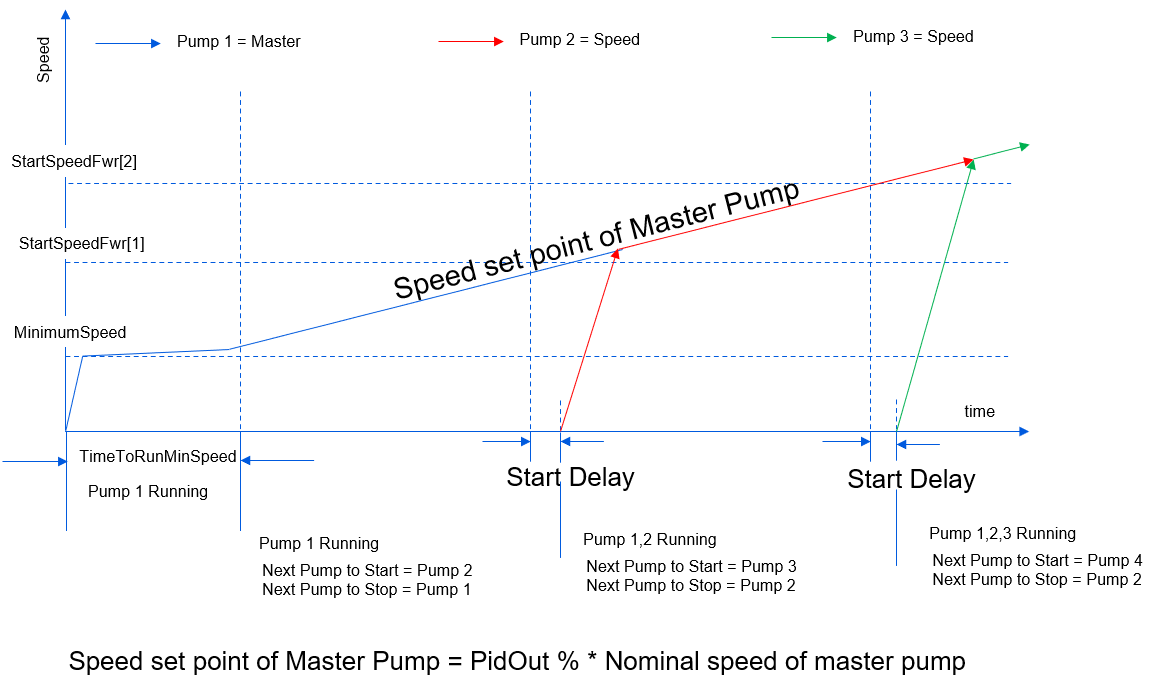
当流程启动时,第一台泵以“MinimumSpeed” 的速度运行,运行时间在“TimeToRunMinSpeed” 持续时间中定义。在此过程中,管道开始逐渐充气,然后 PID 控制器开始正常工作。
-
PID 对所需压力和实际压力进行比较,以百分比形式生成输出。该输出必须连接至功能块“PmpPressureDistributor” 。
-
功能块“PmpPressureDistributor” 接收“PidOut” 。分配器将 PID 输出转换为主泵的速度。
-
功能块“PmpSequenceGen” 有“MasterPump” 信息。
-
“PidOut” 在此方法中按速度缩放:
“主泵” 的速度参考= (“主泵”的“名义速度” ) * (“PidOut”/100)
-
随着 PID 输出的增加,主泵的速度也会增加。PID 输出越高,表示需求量越大。如果一台泵无法满足要求,则需要更多的水泵(后续泵)来启动和供水,以保持压力。
-
如果“MasterPump” 的速度参考值增加,以至于超过“StartSpeedFwr[1]” ,则网络中的第一个从动装置将启动。哪个泵要启动的信息来自功能块“PmpSequenceGen” ,输出端“NextPumpToStart” 。
-
如果“主泵” 的速度参考值进一步增加,以至于超过“StartSpeedFwr[2]” ,则启动第二台从动泵。这个顺序一直持续到需求增加为止。请参见下面的时序图。
-
启动延迟:启动下一个泵的延迟时间 [s]
-
-
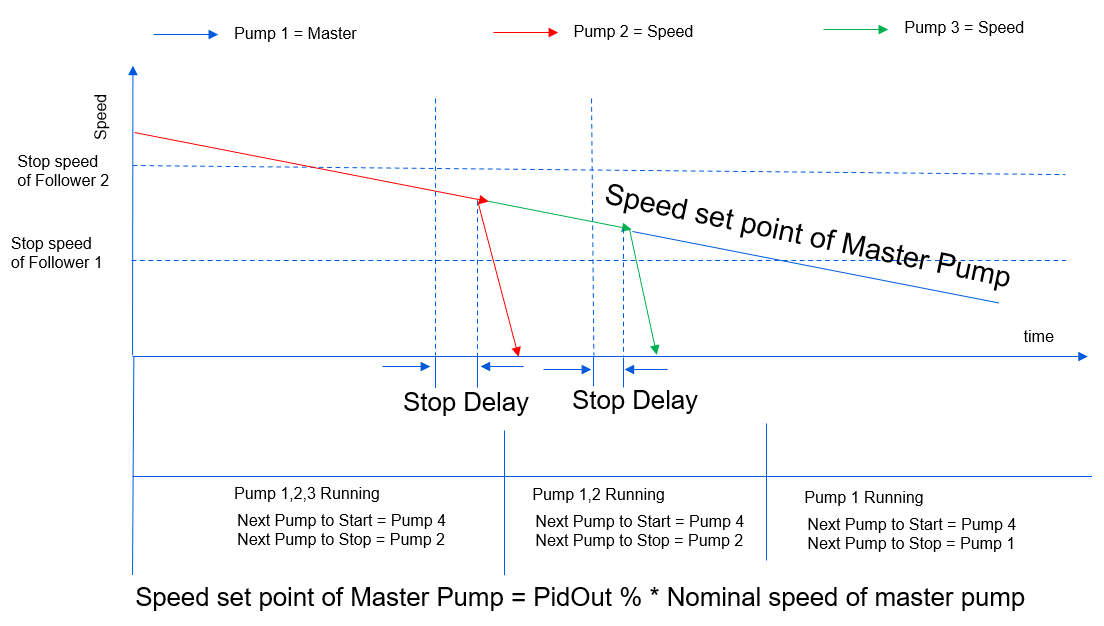
同样,当需求减少时,主站的速度基准也会降低。请参见下面的时序图。当主泵的速度参考值低于“StopSpeedFwr[1]” 时,第一个从动装置停止。下一个要停止的泵的 ID 来自“PmpSequenceGen” ,即“NextPumpToStop” 。如果“主泵” 的速度参考值进一步降低,以至于小于“StopSpeedFwr[2]” ,则第二台从动泵停止。如此循环往复,直到需求减少。
上图中的从动泵被认为处于“FollowerMode”= 1,复制主速度。如果“FollowerMode”= 2(固定速度),它们也能以各自的速度运行。
-
停止延迟:停止下一个泵的延迟时间 [s]
-