





可以通过位置(软件限位开关)和速度来限制运动。默认情况下,PS5611-Motion 不激活软件限位开关。可以通过访问PLCopen 的某些参数来激活它们。
下面介绍的功能只适用于线性轴。
|
参数 |
数据类型 |
最低 |
最大 |
默认值 |
R/W |
说明 |
|
|---|---|---|---|---|---|---|---|
|
2 |
SWLimitPos |
DINT |
2147483647 |
2147483647 |
2147483647 |
R/W |
正软件限位开关位置。 |
|
3 |
SWLimitNeg |
DINT |
2147483647 |
2147483647 |
2147483647 |
R/W |
软件限位开关的负位置。 |
|
4 |
EnableLimitPos |
BOOL |
假 |
真 |
假 |
R/W |
启用正软件限位开关。 |
|
5 |
EnableLimitNeg |
BOOL |
假 |
真 |
假 |
R/W |
启用负软件限位开关。 |
|
2003 |
EnableLimit2Decelerate |
BOOL |
假 |
真 |
假 |
R/W |
启用软件限位开关减速 |
|
2004 |
EnableLimitAbort |
BOOL |
假 |
真 |
假 |
R/W |
启用软件限位开关将终止正在进行的运动 FALSE = 限制位置和速度,减速并显示警告,直到达到位置限位,然后ERROR STOP TRUE = 关闭任何正在进行的运动,减速到位置限位,然后ERROR STOP |
|
2005 |
EnableLimtVelocity |
BOOL |
假 |
真 |
假 |
R/W |
如果速度有限,将尽可能覆盖未移动的位置 |
|
2006 |
SWLimit2DecPos |
LREAL |
-2147483647 |
2147483647 |
2147483647 |
R/W |
用作 EnableLimit2Decelerate 的终点位置 |
|
2007 |
SWLimit2DecNeg |
LREAL |
-2147483647 |
2147483647 |
2147483647 |
R/W |
用作 EnableLimit2Decelerate 的终点位置 |
|
2008 |
MaxPositionGap |
LREAL |
0 |
214748364700 |
0 |
R/W |
用于在位置落后时停止正在进行的移动 |
可能会出现以下不同的行为:
-
完全没有限制(默认值)
-
用 ERRORSTOP 限制位置:
-
在 SWLimitNeg 至 SWLimitPos 之间限制位置,如果位置超出范围,轴将处于ERRORSTOP 状态。
-
-
限制速度和加速度:
-
将速度限制为 paraMaxVelocityAppl,将加速度/减速度限制为 paraMaxDecelerationAppl,创建 WARNING_VELOCITY,不改变轴的状态,由于受到限制,当达到 MaxPositionGap 时可选择终止运动。
-
-
带斜坡下降功能的极限位置:
-
此外,还可以限制 SWLimit2DecNeg 和 SWLimit2DecPos 之间的位置。 paraMaxDecelerationAppl 用于斜坡下降。
-
当使用 EnableLimitPos 或 EnableLimitNeg 激活时,反应如下:
-
当控制位置到达相应的限位开关时,轴将进入ERRORSTOP 状态,Drive_Release 关闭。实际位置可能落后,这取决于以下错误。假定执行的是驱动或特定应用制动。轴将停在限值之后。
-
可通过 MC_Power 重新开启轴。反方向运动是可能的。
-
EnableLimitPos 和 EnableLimitNeg 的功能不变。
在达到软件限位开关之前,您可以利用运动限制提前实现软制动或可调制动。限位由三个布尔参数激活,并将计算到限位开关的位置距离,该距离取决于实际速度和给定的减速斜坡。"paraMaxDecelerationAppl "用于减速。当达到计算位置时,它将以给定的减速斜坡使轴减速,并在软件限位开关处停止。原始行为不会改变,因此如果这些软件限位开关也被激活,轴可能会被设置为ERRORSTOP 状态。
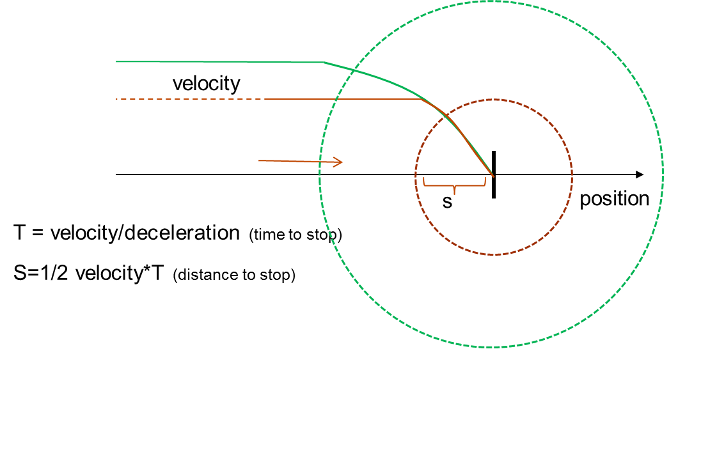
有 2 种不同的模式:
-
EnableLimitAbort = TRUE
任何正在进行的运动都将立即终止(当达到停止距离时,如上图所示),并显示警告信息
轴将减速以达到软件限位开关。
-
EnableLimitAbort =FALSE, EnableLimitDecelerate=TRUE
根据给定的减速和位置限值,显示警告并降低速度。
正在进行的运动不会中止。如果只是 "紧密配合",例如在主从运动中,方向很快就转过来了,那么运动就有可能继续。
由于正在进行的运动不会中断,激活的运动可能无法完成,例如 MC_MoveAbsolute 运动将永远无法到达目标位置。功能块 CMC_Basic_Kernel 显示警告。
当 EnableLimitPos = TRUE 或 EnableLimitNeg = TRUE 且设置了 SWLimitPos 或 SWLimitNeg 值时,当达到这些位置限制时,轴将被设置为 ERRORSTOP 状态。
此外,该功能块还可以限制速度。当 EnableLimitVelocity = TRUE 时,它将监控来自位置基准的速度需求,并限制位置基准,这样就不会超过给定的速度限制。将显示警告。用于限制的速度是 MaxVelocityAppl。
速度限制可用于防止短期速度偷窥。有限的位置将尽可能在以后补上。这可能会导致意想不到的行为。可以检查 CMC_Basic_Kernel 发出的 WARNING,并利用它来停止运动。当位置落后于 MaxPositionGap 时,运动将自动终止。
-
对于单轴运动,指令速度在开始时受到限制。不会出现位置间隙。
-
在多轴运动中,从动轴跟随主轴运动。这可能会造成位置差距。使用限制功能可减少主轴的速度偏移。如果由于 MaxPositionGap(最大位置间隙)的值而导致主站速度过快,则移动将被中止。
使用 EnableLimit2Decelerate 或 EnableLimitAbort 时,速度限制为 EnableLimitVelocity = FALSE 时的 MaxVelocitySystem。该函数修改位置参考。修改后的位置参考用于控制驱动装置。只要限制出现干扰,内核就会显示警告或错误。情况消除后,警告或错误信息将消失。
|
参数编号 |
参数名称 |
价值 |
评论 |
|---|---|---|---|
|
4 |
EnableLimitPos |
真 |
当位置超出时,ERRORSTOP 停止,之前未发出警告或减速。 |
|
5 |
EnableLimitNeg |
真 |
|
|
2003 |
EnableLimit2Decelerate |
假 |
|
|
2004 |
EnableLimitAbort |
假 |
|
|
2005 |
EnableLimtVelocity |
假 |
|
参数编号 |
参数名称 |
价值 |
评论 |
|---|---|---|---|
|
4 |
EnableLimitPos |
假/真 |
当在使用 MaxDecelerationAppl 计算出的减速距离内达到位置限制时,降低速度。在 CMC_Basic_Kernel 显示警告。基本运动保持活跃。EnableLimitPos = TRUE 或 EnableLimitNeg = TRUE:当达到位置极限时,如果使用了 EnableLimitPos 或 EnableLimitNeg,轴也会被设置为 ERRORSTOP 模式。否则,只能限制移动,而不会影响状态机。已激活的定位移动将无法到达目标。速度限制为 MaxVelocitySystem。 |
|
5 |
EnableLimitNeg |
假/真 |
|
|
2003 |
EnableLimit2Decelerate |
真 |
|
|
2004 |
EnableLimitAbort |
假 |
|
|
2005 |
EnableLimtVelocity |
假 |
|
参数编号 |
参数名称 |
价值 |
评论 |
|---|---|---|---|
|
4 |
EnableLimitPos |
假/真 |
当在使用 MaxDecelerationAppl 计算出的减速距离内达到位置限制时,降低速度。在 CMC_Basic_Kernel 显示警告。基本运动保持活跃。EnableLimitPos = TRUE 或 EnableLimitNeg = TRUE:当达到位置极限时,如果使用了 EnableLimitPos 或 EnableLimitNeg,轴也会被设置为 ERRORSTOP 模式。否则,只能限制移动,而不会影响状态机。已激活的定位移动将无法到达目标。速度限制为 MaxVelocitySystem。 一旦发出警告,正在运行的PLCopen 功能块将立即终止。EnableLimitPos = TRUE 或 EnableLimitNeg = TRUE:达到位置极限时,轴将被设置为 ERRORSTOP 模式。 |
|
5 |
EnableLimitNeg |
假/真 |
|
|
2003 |
EnableLimit2Decelerate |
--- |
|
|
2004 |
EnableLimitAbort |
真 |
|
|
2005 |
EnableLimtVelocity |
假 |
|
参数编号 |
参数名称 |
价值 |
评论 |
|---|---|---|---|
|
4 |
EnableLimitPos |
--- |
检查速度,并将其限制在 MaxVelocityAppl 值范围内。显示警告。主动运动不会中止。该功能独立于软件限位开关。 |
|
5 |
EnableLimitNeg |
--- |
|
|
2003 |
EnableLimitDecelerate |
--- |
|
|
2004 |
EnableLimitAbort |
--- |
|
|
2005 |
EnableLimtVelocity |
真 |