





Configuration of the HA system without communication interface modules to establish redundancy is done by the following steps (for details see the example documentations):
-
Install the hardware ⮫ “Hardware, requirements and options overview”.
-
Select the CPUs based on the requirements ⮫ “CPU choice, system size and performance indications”.
-
Install Automation Builder including the latest libraries ⮫ “How to get and install the AC500 High Availability system package”.
-
Create a new project in Automation Builder for the chosen CPUs.
-
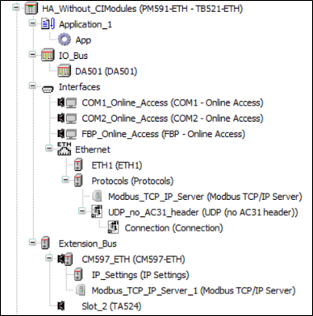
Configure the required Modbus and UDP configuration in the Automation Builder device tree of the CPU.
-
For UDP in AC500 PLC, configure “UDP_no_AC31_header” and set the port number to value '3000'.

-
Assign the IP addresses in ³ 2 different Ethernet networks:
-
SCADA network: SCADA, connected PLC A and PLC B
-
Field network: connected CI52x module(s)
-
-
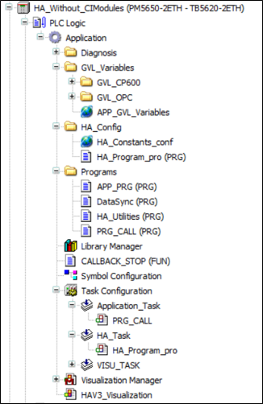
Configure the mandatory HA_MOD_CONTROL function block for the HA task ⮫ “HA program”.
-
Add Callback stop function HA_MOD_CALLBACK_STOP and call it in the system event “stop”.
-
Add optional HA utility function blocks or function block HA_MOD_DATASYNC.
-
Make the global variable xNoCiBus = TRUE to run the system without communication interface module configured in the system⮫ “HA Modbus system without communication interface modules in the network”.
-
Add the task configuration ⮫ “Task configuration recommendations for HA system”.
-
Activate the runtime license if it is a V3 PLC to enable HA system⮫ “PLC runtime licensing”.
-
Compile and download to both PLCs (simplified in V3 via integrated download manager).
-
Create a boot project, restart the complete system and RUN.
-
Operation: Test use cases (e.g. by putting the primary PLC to STOP mode and observe the switchover). For different use cases and behavior refer to .
-
Runtime error and diagnosis function block can be used to monitor the system ⮫ “Diagnosis”.