





-
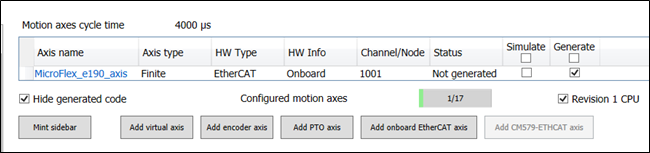
To start adding devices click “Add onboard EtherCAT axis”.
-
Adding EtherCAT devices to the master.
Here user find any of EtherCAT drives or devices needed for the application. The user can also add the axis by right clicking on the “EtherCAT_Master” object and select the “Add Object ”option or by using the [Add axis] button from “Motion Solution Wizard” overview page.
If user wants to add multiple servo drives, please uncheck the “Close this dialog after each transaction” check box (in left bottom corner) and add multiple drives without closing. In AC500 CPU user can add the EtherCAT motion axis only on the coupler slot 1.