-
Click menu “Tools Options” and select “Device editor” in the “Options” window.
-
Enable first checkbox “Show generic device configuration views” and click [OK].
Append a CM598-CAN
-
Right-click on your desired Slot below node “Extension_Bus” and click “Add object”.
Dialog “Replace object:” appears.
-
Click “CM598_CAN” in the list and click [Replace object].
-
Double-click “CM598_CAN (CM598-CAN)” to get the “CM598-CAN Parameters” in the editor window.
The following parameters are available:
|
Parameter |
Default value |
Value |
Description |
|---|---|---|---|
|
Run on config fault |
No |
No |
In case of a configuration error, the user program is not started. |
|
Yes |
The user program is started independent of a faulty configuration of the CM598-CAN communication module. |
||
|
CANopen Sync mode |
Sync Bus only |
Sync Bus only |
The “CANopen Manager” sends sync messages (if enabled) to CAN bus only. The properties of the sync message are configured in the “CANopen Manager” parameters. |
|
Sync Bus and task |
“CANopen Manager” sends sync messages to CAN bus and triggers IEC task. ⮫ “Configuration of SYNC task” |
The tab “CAN Bus” contains the basic settings of the CAN bus and special settings for the CAN 2.0 B protocol.
The settings at “29 Bit COB-ID” are only valid for CAN 2.0 B protocol. Ensure the option “Enable 29 Bit COB-ID” is enabled. Otherwise no CAN 2.0 B frames can be received. With the other parameters at “Enable 29 Bit COB-ID” the receive filter is configured.
SAE J1939
An example project which demonstrates using and handling the SAE J1939 protocol in PLCs is given in the application example ⮫ AC500 SAE J1939 protocol.
|
Parameter |
Default value |
Value |
Description |
|---|---|---|---|
|
Bus parameters |
|||
|
Transmission rate |
250 kBit/s |
10 kBit/s 20 kBit/s 50 kBit/s 100 kBit/s 125 kBit/s 250 kBit/s 500 kBit/s 800 kBit/s 1000 kBit/s |
Transmission speed in [kBit/s] |
|
Node settings |
|||
|
Stop in case of monitoring error |
Disabled |
Disabled |
The manager does not stop in case of a monitoring error (Node Guarding or Heartbeat Error). A loss of communication to one node has no influence to other nodes. The manager tries to reestablish the communication to the error affected nodes. |
|
Enabled |
If this function is enabled, the manager will also stop the communication to all responding and active nodes. |
||
|
Send “Global Start Node” |
Enabled |
Disabled |
No “Global Start Node” message is sent after configuring the nodes. |
|
Enabled |
A “Global Start Node” message is sent after configuring the nodes. This synchronize all nodes again. |
||
|
29 Bit COB-ID |
|||
|
Enable 29 bit COB-ID |
Disabled |
Disabled |
29 bit CAN-IDs are disabled, but 11 bit CAN-IDs are still enabled. |
|
Enabled |
29 bit CAN-IDs are additional enabled. |
||
|
Acceptance mask |
0 |
29 bit |
Specifies the bits of a CAN-ID which will be evaluated by the filter. For instance, with an acceptance mask = 0x1FFFFFFF all bits are evaluated. |
|
Acceptance code |
0 |
29 bit |
Specifies the bits of a CAN-ID which has to be set to pass the filter. Only those bits which are set in the acceptance mask are relevant. |
The tab “CM598-CAN I/O Mapping” contains bus cycle option used for CANopen configuration. The following parameters are available:
|
Parameter |
Default value |
Value |
Description |
|---|---|---|---|
|
Bus cycle task |
Use parent bus cycle setting |
Use parent bus cycle settings |
Settings from “PLC settings” tab are used. |
|
Task |
Name of the task that triggers the bus cycle |
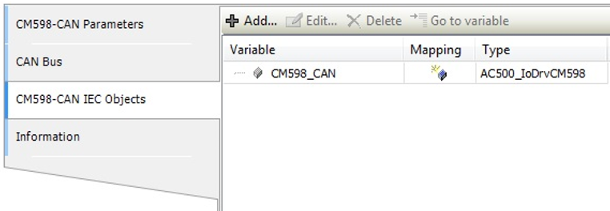
The tab “CM598-CAN IEC Objects” contains the created instance of the IO driver.